Drucken / laden Sie das Produktblatt herunter
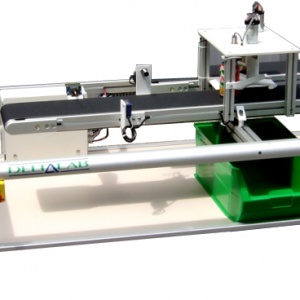
Drucken / laden Sie das Produktblatt herunterDer TRIAXE ist ein 3-Achsen-System mit verschiedenen Technologien.
Diese Ausrüstung ist eine verkleinerte Nachbildung eines Stapelkrans, der in Kernkraftwerken verwendet wird. Es ermöglicht die Lagerung hochradioaktiver Abfälle in einem geeigneten Becken. Dieser in Form von Brennstäben dargestellte Abfall wird in Hohlräumen im Becken gespeichert. Im Rahmen des TRIAXE stehen 2 Lagerbereiche mit jeweils 4 Standorten zur Verfügung.
Aktoren
- 24V bürstenloser Motor (mit integriertem 12-Punkt-Encoder)
- Gleichstrommotor mit Kugelumlaufsystem, Motor-Ein / Aus-Funktion mit 2 Positionen
- Pneumatikzylinder Ø20 doppeltwirkend mit allen oder gar nichts
- Pneumatische Zange (3 Finger) am Ende des Pneumatikzylinders montiert. Monostabile Pinzette mit zwei Positionen
Detektoren:
"Raum Präsenz" Sensoren Speicherort:
- Lichtleiter, - Induktiver Sensor,
- kapazitiver Sensor,
- Mechanischer Anschlag mit Rolle
Sensoren auf der X-Achse verfügbar:
- 2 mechanische Endanschläge mit Umlenkrolle
- 1 12-Punkt-Geber zur Positionierung der Achse
Sensoren auf der Y-Achse verfügbar:
- 2 mechanische Endanschläge mit Rolle
- 2 induktive Sensoren zur Positionierung der Achse
Sensoren auf der Z-Achse verfügbar:
- 2 magnetische ILS-Detektoren für die Position des Sinkzylinders - 1 Magnetdetektor an der pneumatischen Klemme
Die Sensoren sind hauptsächlich auf Steckverbindern montiert (für einen Ersatz oder eine gründliche Untersuchung der Komponente)
Mensch / Maschine-Schnittstelle:
- Remote-Konsole auf einem mobilen Arm auf der Vorderseite des Systems angeordnet. Es hat 2 Betriebsmodi (Schritte und
automatisch).
- Manuelle Steuerung des Systems auf der Remote-Konsole sowie ein Not-Aus.
- Tür mit einem Sicherheitssensor (codierter Magnet) ausgestattet und an ein standardisiertes Sicherheitsrelais angeschlossen.
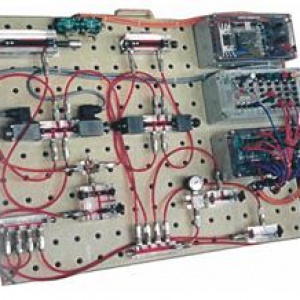
SPS:
- SPS (mit Kabel und Programmiersoftware geliefert),
- Kommunikationskarte mit RS485-Ausgang zur Kommunikation mit der Dialogkonsole.
Überwachung:
Diese Anwendung unter PLANT VUE ermöglicht den Dialog mit dem TRIAXE System Controller. Das verwendete Kommunikationsprotokoll ist Modbus Ethernet.
Diese Überwachung hat 2 Modi:
- Administrator (Vollzugriff)
- Gast (eingeschränkter Zugang)
Mehrere Synoptiken werden vorgeschlagen:
- Synoptic main: Es erlaubt die verschiedenen Verschiebungen einzustellen, indem man auf den Ausgangspunkt und den Ankunftspunkt klickt und die dynamische Entwicklung des Systems in Echtzeit visualisiert.
- Alarme: Die vorliegenden Fehler werden in Listenform angezeigt. Dieser Bildschirm dient zum Anzeigen der Historie von Alarmen und Ereignissen.
- Synoptische Konfiguration: Diese Seite ist für den Administratormodus reserviert.
Es ermöglicht insbesondere die Einstellung der X-Achse (Brushless-Motordrehzahl und -position).