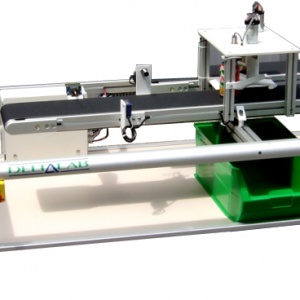
La plataforma de 6 ejes, EX800, es un conjunto para llevar a cabo un estudio muy completo sobre un equipo de alto rendimiento representativo de simuladores de vuelo y conducción, máquinas herramientas, cine dinámico, robots, telescopio astronómico de gran tamaño.
La plataforma incluye:
- Una parte operativa
- Una parte de comando
La arquitectura de la parte operativa es la de un robot paralelo con 6 cilindros. Cada uno de los cilindros tiene un extremo articulado en una base fija y el otro extremo está articulado en una plataforma móvil.
Cada cilindro es un cilindro eléctrico construido a partir de un enlace helicoidal motorizado que utiliza un motor de CC.
El servocontrol de cada toma se realiza mediante un sensor de posición absoluta. Está optimizado por un generador de tacómetro. Un séptimo cilindro está montado aislado en un soporte específico. Permite realizar pruebas (rigidez, influencia de los parámetros del servocontrol, etc.) al tiempo que se evitan los fenómenos de acoplamiento dinámico que se encuentran en una plataforma de 6 ejes.
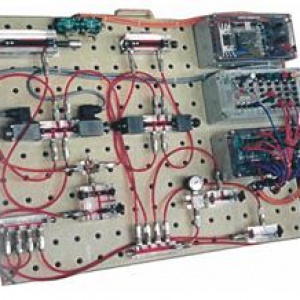
El control de los 6 ejes de la plataforma se realiza desde una PC, una tarjeta de interfaz de E / S (en formato PCI) y una tarjeta de control de 7 ejes integrada en la base de
la plataforma.
La comunicación entre la PC y la plataforma es en ambas direcciones. La adquisición de datos (punto de ajuste de la posición, retroalimentación de la posición de la velocidad, par) se realiza en tiempo real en 3 ejes.
El estudio de pequeños desplazamientos se lleva a cabo mediante un sistema de medición con 6 comparadores. Un modelo de la plataforma con cilindros ajustables en longitud y sujetadores magnéticos permite el estudio de las diferentes configuraciones de la plataforma.
Composición del EX800
1 plataforma con 6 cilindros
1 cilindro aislado montado en su soporte específico
1 mesa de medición con 6 comparadores
1 tarjeta de interfaz de E / S y software asociado
Software de simulación y control
1 modelo de plástico con gatos móviles y ajuste manual
1 libro de trabajo que comprende:
- un archivo educativo con textos de TP y corregido
- un archivo de referencia - un archivo técnico
- una descripción de las características del software.
- un conjunto de archivos DAO