Imprimer/t�l�charger la fiche produit
Imprimer/t�l�charger la fiche produitLa plate-forme comprend :
Une partie opérative
Une partie commande
L'architecture de la partie opérative est celle d'un robot parallèle comportant 6 vérins. Chacun des vérins comporte une extrémité articulée sur une embase fixe et l'autre extrémité s'articule sur une plate-forme mobile.
Chaque vérin est un vérin électrique construit à partir d'une liaison hélicoïdale motorisée à l'aide d'un moteur à courant continu.
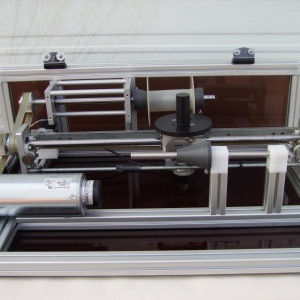
L'asservissement de chaque vérin est réalisé par un capteur de position absolue. Il est optimisé par une génératrice tachymétrique. Un septième vérin est monté isolé sur un support spécifique. Il permet d'effectuer des tests (raideur, influence des paramètres de l'asservissement...) en s'affranchissant des phénomènes de couplage dynamique rencontrés sur une plateforme 6 axes.
La commande des 6 axes de la plate-forme s'effectue à partir d'un PC, d'une carte d'interface E/S (au format PCI) et d'une carte de commande 7 axes intégrée dans l'embase de la plateforme.
La communication entre le PC et la plate-forme s'effectue dans les deux sens. L'acquisition de données (consigne de position, recopie de position vitesse, couple) s'effectue en temps réel sur 3 axes.
L'étude des petits déplacements est effectuée par un système de mesure à 6 comparateurs. Une maquette de la plateforme possédant des vérins ajustables en longueur et des fixations magnétiques permet l'étude de configurations différentes de la plateforme.
Carte d'axes
P et D fixes sur les axes de la plate-forme
P et D variables sur le vérin isolé
Alimentation basse tension intégrée
L'équipement standard référencé EX800
1 ensemble plateforme compotant 6 vérins
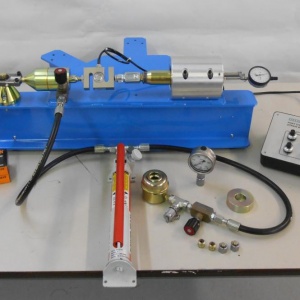
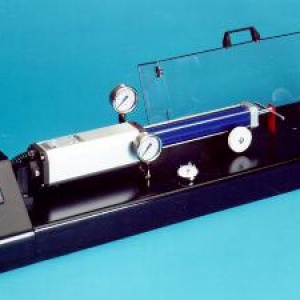
1 vérin isolé monté sur son support spécifique
1 table de mesure à 6 comparateurs
1 carte d'interface E/S et logiciel associé
Les logiciels de simulation et de pilotage
1 maquette en plastique avec vérins mobiles et réglage manuel
1 classeur comportant :
L'équipement complémentaire optionnel :
une mallette d'étude technologique d'un vérin seul: EX514
un kit complet pour la mesure d'effort EX830